Мышечные волокна могут служить приводами для роботов. При небольшом размере они оказываются мощнее и точнее в движении, чем большинство искусственных приводов. Однако точная регулировка подобных приводов невозможна без тщательного изучения движений мышц. Обычно для этого используются измерения изгиба простых тонких балок под действием прикрепленного к ним мышечного волокна. Студенты Массачусетского технологического института разработали новую упругую конструкцию, которая значительно эффективнее и точнее реагирует на сокращения волокон.
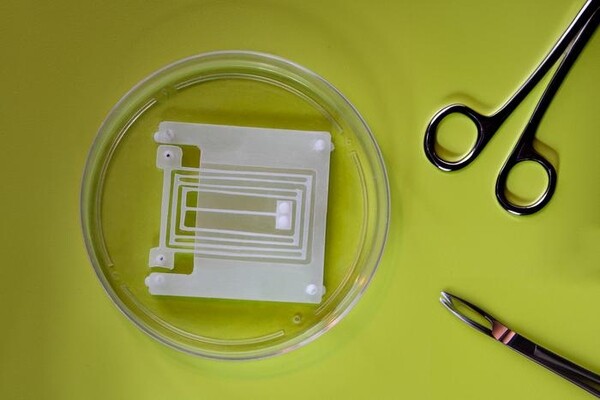
Исследователи разработали конфигурацию и размеры устройства на основе многочисленных расчетов, соотносящих естественную силу мышц с жесткостью и степенями свободы движения. Конструкция раздвигается подобно мехам аккордеона, когда ее тянут в стороны прикрепленные к углам ленты из живых мышечных волокон, выращенных из клеток мыши. Устройство позволяет с большой точностью измерить эффективность работы мышц и выяснить, например, насколько зависит утомляемость мышцы от частоты ее сокращений. Подобные устройства могут использоваться и при создании роботов.
.jpg)