Начиная с 1994 г. ЕС реализует программу ACTS (Advanced Сommunications Technologies and Services — Передовые коммуникационные технологии и сервисы), цель которой — внедрение новейших достижений в области телекоммуникаций на территории Европы. Одним из направлений программы стал проект MULTICUBE (MULTIpoint to MULTIpoint Broadband Switched Network Services for distributed MULTImedia Applications), основной задачей которого является развитие АТМ-сервиса, поддерживающего мультимедийные приложения в соединениях группа—группа. Проект в первую очередь ориентирован на пользователей, связанных с автомобильной и аэрокосмической индустрией.
Заметим: MULTICUBE — это первый международный АТМ-проект, в котором приняла участие Россия. Центральный научно-исследовательский институт робототехники и технической кибернетики (ЦНИИ РТК, С.-Петербург) участвует в данном проекте с 1996 г.
Во время проведения 48-го Международного аэрокосмического форума (IAF'97), состоявшегося в октябре 1997 г. в Турине (Италия), в рамках проекта MULTICUBE был проведен крупномасштабный эксперимент. Робот-манипулятор, находившийся в С.-Петербурге, управлялся из Турина с использованием сетевой АТМ-инфраструктуры ЦНИИ РТК и RUSnet. Возможности системы управления были продемонстрированы на специализированной выставке космической техники, приуроченной к IAF'97.
Эксперимент предпринят для проверки работоспособности и оценки эффективности распределенной системы управления сложным динамическим объектом. Система была построена на базе открытых стандартов Internet и АТМ; по компьютерной сети осуществлялись регулирующие воздействия на объект, а также передавалась аудио- и видеоинформация о его состоянии. Особое внимание уделялось проверке технических и организационных решений, направленных на создание трансконтинентальной телекоммуникационной системы, совместимости технических средств различных производителей и эффективности взаимодействия операторов связи.
Объектом управления стал 15-метровый робот-манипулятор, созданный в ЦНИИ РТК для космического корабля "Буран" (см. врезку "Бортовой манипулятор"). Для имитации условий невесомости робот был объединен с уникальной системой механической разгрузки (см. врезку "Стенд управляемой гравитации"), позволяющей практически полностью скомпенсировать влияние гравитации (рис. 1).
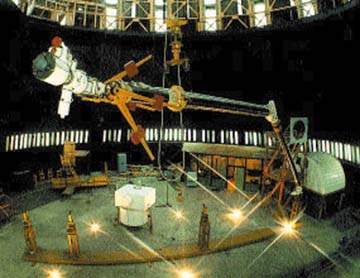
Рис. 1. Установка, позволяющая скомпенсировать силу тяжести
В процессе выбора программно-аппаратного комплекса для управления манипулятором через IP-сеть обсуждались два подхода — создание специализированных приложений и применение уже существующих стандартных протоколов и программных продуктов. Был избран второй подход, поскольку одним из требований проекта MULTUCUBE была проверка возможности использования различных платформ, а основной задачей программы ACTS является выработка рекомендаций по применению стандартных программных средств и протоколов.
Для создания "пульта оператора" требовалась универсальная (т. е. способная работать на любой аппаратной платформе) программа, обеспечивающая интерактивное взаимодействие оператора и объекта управления. Было решено воспользоваться стандартным WEB-браузером (например, Netscape Communicator версии 4.0 и выше или Microsoft Internet Explorer версии 4.0 и выше), позволяющим работать с фреймами, формами и битовыми картами. Такой выбор значительно упростил дальнейшую работу над интерфейсом системы.
Все необходимые для координации движения вычисления и логические операции производились на Web-сервере, расположенном в С.-Петербурге. Заметим, что используемый в системе протокол HTTP 1.0 позволял инициировать обмен информацией только со стороны клиента, а соответственно, посылать какие-либо "запросы на обслуживание" от робота оператору было нельзя.
При разработке интерфейса для пульта оператора анализировалась возможность применения языка Java. Однако полученные программные модули могли работать не на всех платформах и не обеспечивали дополнительных функций, поэтому от Java пришлось отказаться.
Выбор программного и аппаратного обеспечения для передачи видео- и аудиоинформации также был связан с определенными трудностями. Было решено остановиться на комплексе программ VIC+VAT+WB фирмы W3 и системе видеоконференций ShowMe производства SUN Microsystems, предназначенной для компьютеров той же фирмы.
В результате программно-аппаратный комплекс оказался таким: управляющая роботом специализированная ЭВМ (разработка ЦНИИ РТК) была связана интерфейсом RS 232 с компьютером IBM PC, работающим под ОС Linux. Запущенный на этом компьютере Web-сервер Apache обеспечивал взаимодействие с браузером пользователя. Интерфейс пульта оператора реализован на основе стандартных средств языка HTML 3.0. Обработка информации и взаимодействие со специализированной ЭВМ осуществлялись с помощью СGI-подпрограмм, написанных на языке C (разработка ЦНИИ РТК).
В этой же ЭВМ были установлены два видеоадаптера FrameGrabber Matrox Meteor фирмы Matrox, что позволяло одновременно передавать изображения с двух телекамер. Рабочая станция SUN Sparc 20 внешней системы контроля, подключенная к АТМ-коммутатору ASX200BX компании FORE Systems, также была снабжена двумя устройствами FrameGrabber.
Следующей технической задачей была интеграция комплекса с сетевой инфраструктурой (в данном случае — с сетью АТМ). Отсутствие соответствующего драйвера заставило отказаться от использования АТМ-адаптера непосредственно в управляющей машине. АТМ-канал заканчивался в компьютере SUN Sparc 20, работающем под управлением ОС Solaris и выполняющем роль маршрутизатора (шлюза) между интерфейсами АТМ и локальной сети Ethernet.
Главной организационной проблемой стало обеспечение АТМ-канала через территорию Европы, имевшего необходимую пропускную способность и заданный уровень сервиса (QoS). Она была решена с участием европейских телекоммуникационных компаний.
В эксперименте оказалась задействованной протяженная сетевая инфраструктура, объединяющая ресурсы европейской исследовательской АТМ-сети JAMES, итальянской компании Telecom Italy, финской фирмы Telecom Finland (теперь она называется Sonera) и АТМ-сегмента сети RUSnet. На участках сетей RUSnet и Telecom Italy был выделен SDH-канал cо скоростью 155 Мбит/с (STM1), на участке сети Sonera — PDH канал со скоростью 34 Мбит/с (Е3), а в сети JAMES организован виртуальный канал с пропускной способностью 4 Мбит/c.
На основе этих сетей был создан постоянный виртуальный АТМ-канал (PVC) с пропускной способностью 4 Мбит/с. Маршрутизация IP-пакетов через АТМ-сеть осуществлялась по протоколу Classical IP-over-ATM. Зоны ответственности операторов сети показаны на рис. 2.
Рис. 2. Экспериментальный IP-канал на базе АТМ
Пульт оператора на выставке в Турине представлял собой мультимедийный компьютер с полиэкранной оболочкой (Sparc 20/Solaris фирмы SUN и SGI/IRIX производства Silicon Graphics Inc.). В одном из окон оператор видел собственное изображение, в двух других — переключаемые изображения с трех камер, установленных непосредственно на манипуляторе, рядом с ним и на имитаторе кабины управления космического корабля "Буран". В одном из окон средствами Web-браузера моделировался собственно пульт управления, предоставляющий оператору средства целеуказания, задания параметров движения манипулятора и ввода команды "пуск".
При нажатии кнопки "пуск" манипулятор начинал выполнять команду. Причем в окнах пульта оператора и на демонстрационных экранах в режиме реального времени отображались общий вид движущегося манипулятора и вид из TV-камеры, установленной на схвате манипулятора.
В ходе эксперимента была подтверждена работоспособность построенной инфраструктуры, опробованы различные программно-аппаратные платформы (IBM PC/Linux, Sun SS20/Solaris, SGI/IRIX), стандартные протоколы и программные продукты, а также расширенная модель межсетевого взаимодействия (клиент—агент—сервер), используемая для создания распределенных систем управления. На основе этой же инфраструктуры в рамках форума IAF'97 проводились видеоконференции с участием итальянских и российских специалистов.
Эксперимент продемонстрировал интеллектуальный и технический потенциал России в областях создания уникальных инженерных сооружений и развертывания систем телекоммуникации, обеспечивающих удаленное управление сложными техническими объектами в режиме реального времени из любой точки Европы. Российский стенд пользовался повышенным вниманием участников и гостей IAF'97, его посетили Президент и Премьер-министр Италии.
Во время проведения эксперимента (PVC функционировал в течение недели по 3 часа в день) в ЦНИИ РТК проходили встречи специалистов и была организована "живая" демонстрация управления роботом из Италии. Интересно, что в ходе одного из сеансов специалисты NASA (также участники Форума), внимательно следившие за экспериментом, попросили, чтобы к находившемуся в С.—Петербурге манипулятору кто-нибудь подошел. Очевидно, они хотели убедиться в том, что наблюдают на экране не анимацию, а именно процесс управления в режиме реального времени. Мы подошли к камере и помахали им... Похоже, американцам понравились наши технические комплексы и система удаленного управления на базе сетевых технологий.
Для более детального ознакомления NASA с разработками ЦНИИ РТК в Россию был направлен Френк Баззард — главный инженер американского модуля международной космической станции "Альфа". В сентябре 1998 г. он посетил ЦНИИ РТК и провел переговоры об использовании технических систем и сетевой инфраструктуры ЦНИИ РТК в проектах NASA.
Интерес к системам управления на основе сетевых инфраструктур проявляет и Европейское космическое агентство. В ноябре запланирован приезд в ЦНИИ РТК немецких специалистов: будут обсуждаться перспективы участия института в Европейском проекте развития высокоскоростных сетей "Public European High-Speed Internet Demonstrations".
ОБ АВТОРАХ
Владимир Заборовский — заместитель директора, Юрий Подгурский — начальник лаборатории, Василий Семеновский — ведущий специалист ЦНИИ РТК. С Юрием Подгурским можно связаться при помощи электронной почты по адресу podg@stu.neva.ru.Бортовой манипулятор
Бортовой манипулятор (БМ) представляет собой многозвенный механизм с электромеханическими приводами, оснащенный системой управления, подсистемами телевидения, освещения, телеметрии, энергообеспечения и др. Он устанавливается на борту орбитального корабля (ОК) и предназначен для выполнения на орбите следующих операций:
- выгрузки доставленного груза;
- стыковки груза с орбитальной станцией;
- захвата свободно летящего в космосе объекта и укладки его в отсек ОК;
- расстыковки и извлечения объекта, находящегося в стыковочном модуле ОК.
Манипулятор может функционировать под управлением космонавта или оператора центра управления полетом.
Основные технические характеристики
Число степеней подвижности манипулятора (в том числе захватного устройства): 8
Длина манипулятора: 15 м
Масса: 360 кг
Развиваемое усилие: 4,5 кгс
Масса перемещаемых грузов: до 30 тыс. кг
Время выполнения операции: 10-25 мин
Погрешность позиционирования: 50 мм
Способ управления: позиционно-контурный
Режимы управления: командный, по вектору скорости, автоматический программируемы